
Introduction to Mechanics:
Mechanics is a foundational branch of physics that explores the motion and behavior of objects under the influence of forces. It forms the backbone of numerous scientific and engineering disciplines, providing critical insights into how physical systems respond to external actions. From the towering stability of skyscrapers to the precise motion of spacecraft, mechanics governs the principles underlying these feats of modern engineering.
This blog provides an in-depth overview of the essential concepts of mechanics, offering a clear and concise understanding of its various branches, laws, and applications. Whether you’re a student, a professional, or an enthusiast, this guide will help you navigate the fundamental principles that define mechanics.
What is Mechanics:
The branch of physics deals with the behavior of physical bodies when subjected to forces or displacements. It encompasses the study of motion, deformation, and the forces that cause these changes.
Statics
Statics is the study of bodies at rest or in equilibrium. It involves analyzing forces and moments acting on structures or components to ensure they remain stationary.
In other words, when the force system acting on a body is balanced, the system has no external effect on the body, the body is in equilibrium.
Dynamics
It is also a branch of mechanics in which the forces and their effects on the bodies in motion are studied. Dynamics is sub-divided into two parts:
- Kinematics: It focuses on the description of motion, including parameters like displacement, velocity, and acceleration, without considering the forces that cause the motion.
- Kinetics: It deals with the forces and torques that cause motion. It involves analyzing the relationship between the motion of objects and the forces acting on them.
Hydromechanics:
It is the study that deals with fluid conditions under which it can remain at rest or in motion. Hydromechanics can be divided into hydrostatics and hydrodynamics.
- Hydrostatics: It is the branch of fluid mechanics that studies fluids at rest. It involves analyzing pressure distribution in a fluid and the forces exerted by a fluid on surfaces in contact with it.
- Hydrodynamics: It is the branch of fluid mechanics that studies fluids in motion. It involves analyzing the flow characteristics of fluids, including velocity, pressure, and turbulence.
Newton’s Laws of Motion
First law
An object remains at rest (if originally at rest) or moves in a straight line with constant velocity if the net force on it is zero.

Second Law
Newton stated that the acceleration of an object is directly proportional to the net force acting on it and in the direction of that net force, and inversely proportional to its mass.

Third Law
The forces of action and reaction between interacting bodies are equal in magnitude and opposite in direction.
F1,2= -F2,1
Newton’s Universal Law of Gravitational
For any two masses, the force is directly proportional to the product of the two masses and is inversely proportional to the square of the distance between them.

where g is a gravitational constant for the two interacting masses.
Hooks Law:
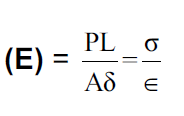
According to Hook’s law, the stress is directly proportional to strain i.e. normal stress (σ) ∝ Normal
strain (ε), and shearing stress (τ) ∝ shearing strain ( γ ).
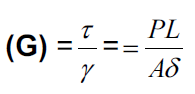
σ=Eε and τ=Gγ
The co-efficient E is called the modulus of elasticity i.e. its resistance to elastic strain. The coefficient
G is called the shear modulus of elasticity or modulus of rigidity.
Young’s Modulus or Modulus of elasticity (E)
Modulus of rigidity or Shear modulus of elasticity (G)
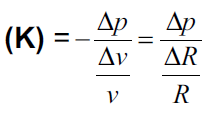
Bulk Modulus or Volume modulus of elasticity (K)
Relationship between the elastic constants E, G, K, μ
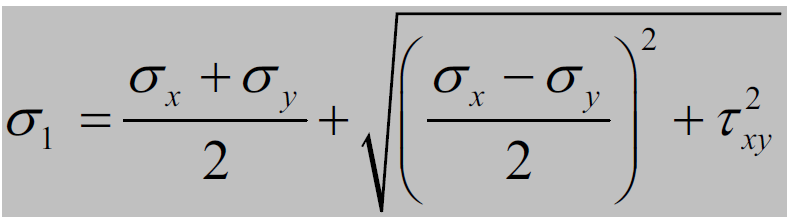
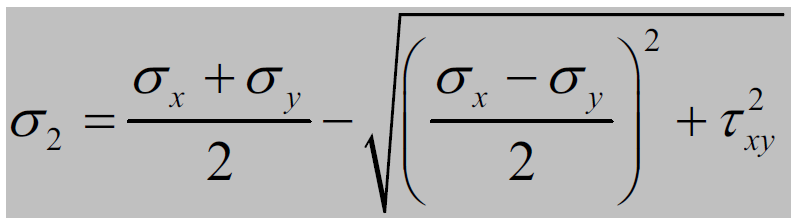
Principal stress and Principal plane:
When examining stress at a point, it is possible to choose three mutually perpendicular planes on which no shear stresses exist in three dimensions, one combination of orientations for the three mutually perpendicular planes will cause the shear stresses on all three planes to go to zero is the state defined by the principal stresses.
Principal stresses are normal stresses that are orthogonal to each other. Principal planes are the planes across which principal stresses act (faces of the cube) for principal stresses (shear stresses are zero)
Major Principal Stress:
Minor Principal Stress:
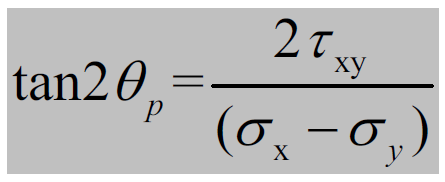
Position of Principal Plane:
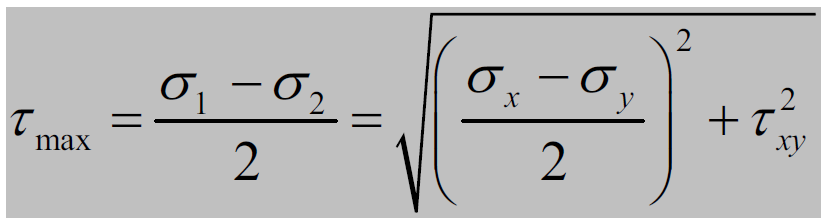
Max shear stress
Fundamental Properties of Mechanics
Centre of gravity:
The center of gravity of a body is defined as the point through which the whole weight of a body may be
assumed to act. A weighing balance is an example of a center of gravity. A seesaw is another example of a center of gravity. A triangular plate’s center of gravity is where the medians intersect.
Centroid:
The centroid or center of the area is defined as the point where the whole area of the figure is assumed
to be concentrated. For example, the centroid of a triangle is the point where the medians of the triangle intersect.
Inertia:
Inertia is the property of a body under which it opposes any agency that attempts to put it in motion or, if it is moving, to change the magnitude or direction of its velocity. It is a passive property and does not enable a body to do anything except oppose such active agents as forces and torques.
E.g. Mass of a stone is more than the mass of a rubber ball of the same size. Therefore, the stone’s inertia is more than a rubber ball’s. When the bus stops suddenly, people fall forward.
Momentum:
Momentum is a fundamental concept in physics that quantifies the motion possessed by an object. It is defined as the product of an object’s mass and velocity. The formula to calculate momentum is:
Momentum = Mass × Velocity.
For example, a heavy truck traveling on the highway has more momentum than a smaller car traveling at the same speed because it has a greater mass. Having more momentum also makes it harder for the truck to stop. An object’s momentum can also change as its motion changes.
Area Moment of inertia:
The area moment of inertia is a property of a two-dimensional plane shape that characterizes its deflection under loading. It is also known as the second moment of area or the second moment of inertia. The area moment of inertia has dimensions of length to the fourth power.
E.g. The area moment of inertia of a beam is used to calculate the beam’s deflection and the stress caused by a moment applied to the beam.
Mass Moment of inertia:
Mass Moment of Inertia is a measure of an object’s resistance to change in rotation direction. Moment of Inertia has the same relationship to angular acceleration as mass has to linear acceleration.
The moment of Inertia of a body depends on the distribution of mass in the body concerning the axis of rotation.
E.g. A solid ball accelerates faster than a hollow ball when rolling down a hill because the solid ball has a lower moment of inertia.
For a point mass, you calculate the Moment of Inertia by multiplying the mass by the square of the perpendicular distance to the rotation reference axis.
I = m r2
Where,
I = moment of inertia ( kg m2)
m = mass (kg)
r = distance between axis and rotation mass (m)
Torsion
Torsion refers to the twisting of a structural member that is loaded by couples (torque) that produce rotation about the member’s longitudinal axis. In other words, a load applies stress to the member, resulting in a couple about the longitudinal axis and causing a twisting motion about that axis.
Torsion Equation

Where,
T = Maximum twisting moment or torque
J = the polar moment of inertia.
G = is the rigidity modulus.
θ = Angle of Twist
L = shaft length
𝝉 = Maximum Permitted Shear tension
r = radius of small strip
Bending Moment
An external force applied at a distance from a reference point causes a structural element to bend, producing a bending moment. It’s a crucial concept in engineering and design, used to determine the strength and stability of structures like bridges and buildings.
E.g. Beams, balconies, aircraft wings, and diving boards are all structural elements commonly subjected to bending moments.
Bending equation:
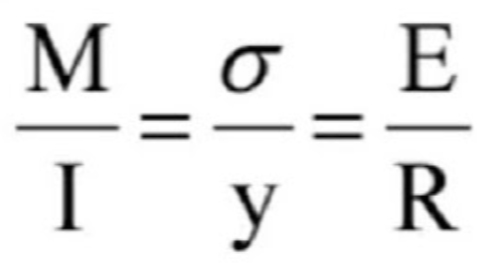
Where,
M = Bending moment.
I = Moment of inertia exerted on the bending axis.
σ = Stress of the fiber at a distance ‘y’ from the neutral/centroidal axis
E = Young’s Modulus of beam material.
R = Curvature radius of this bent beam.
Fundamental velocity equations
First Equation of Motion (Velocity-Time Relation):
v = u + at
Where:
v = final velocity
u= initial velocity
a= acceleration
t= time
Second Equation of Motion (Displacement-Velocity Relation):
v2 = u2 + 2as
Where:
v = final velocity
u = initial velocity
a = acceleration
s = displacement
Basic Velocity Equation (Average Velocity):
v = Δx / Δt
Where:
v = velocity
Δx = change in position (displacement)
Δt = change in time
These equations are essential for solving various problems in kinematics and dynamics, allowing us to determine the velocity, acceleration, and displacement of objects in motion.
Conclusion
Mechanics is the cornerstone of physics, bridging the gap between theoretical principles and practical applications. From understanding the forces that keep a structure stable to analyzing the motion of a rocket soaring into space, mechanics concepts are crucial in shaping the modern world.
In this blog, we’ve explored the foundational branches of mechanics, delved into Newton’s laws, examined stress and strain relationships, and discussed the intricacies of rotational and structural analysis. With these insights, you now have a robust understanding of the fundamental principles that govern motion, forces, and the behavior of physical systems.
Whether you’re applying these principles in engineering, solving real-world problems, or deepening your knowledge of the physical universe, the study of mechanics equips you with the tools to understand and predict how objects interact in various environments.
As you continue your journey in this fascinating field, remember that mechanics is not just about equations and theories; it’s about uncovering the intricate workings of the world around us and using that knowledge to innovate and build a better future.
Thank you for reading!
This is part 2 of the fundamentals of the Mechanical Engineering Series.
To read the first part click the button below.


